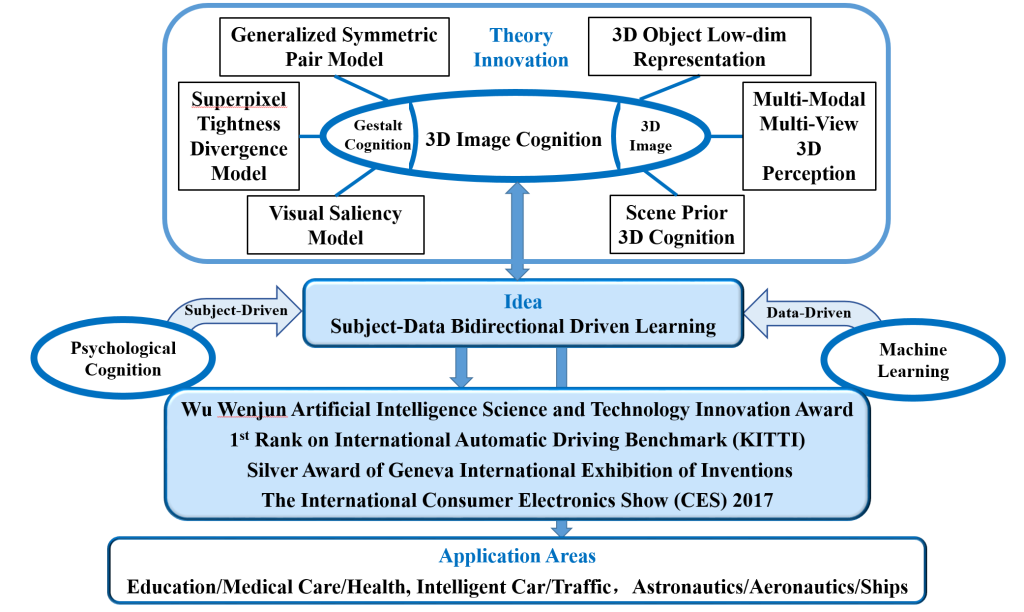
As data-driven machine learning methods are difficult to achieve accurate recognition under dynamic complex scenes, we made a breakthrough based on the psychologically stable prior of cognitive subjects, put forward the thought of Subject-Data Bidirectional Driven Learning, and established the three-dimensional image Gestalt Cognitive Computing Theory. The proposed theory significantly improved the accuracy under dynamic complex scene.
3-D Image Cognition Theory and Technology
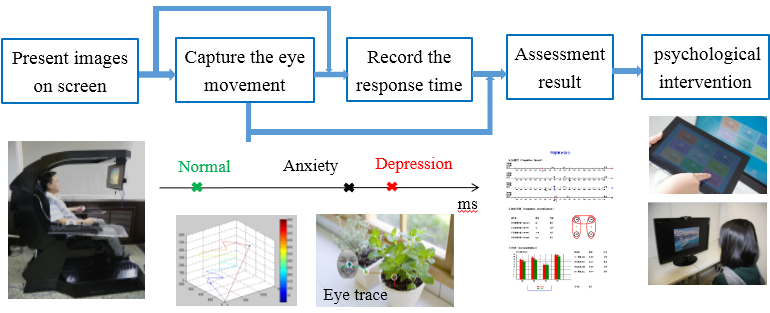
We built the first psychological image database based on MMPI, and designed a set of psychological paradigms based on emotional image cognition. We put forward an objective and rapid psychological characteristic extraction method based on image cognition, which changed the traditional scale-based psychological evaluation model,. This system won the Wu Wenjun Artificial Intelligence Science and Technology Innovation Award (First Class) and Silver Award of Geneva International Exhibition of Inventions.
3D Image Cognition and Visual Navigation
We proposed 3D image cognition computing theory, defined general cognition characters, such as structure and scene prior. We introduced multi-task, multi-modal and multi-view cognitive subject priors into machine learning, realize Subject-Data Bidirectional Driven Learning, and applied them in 3D object detection and localization under complex autonomous driving scenes. Our method won 4 first place on 6 tasks of KITTI dataset, which is the largest autonomous driving benchmark, and achieves accuracy at 90% for the first time.
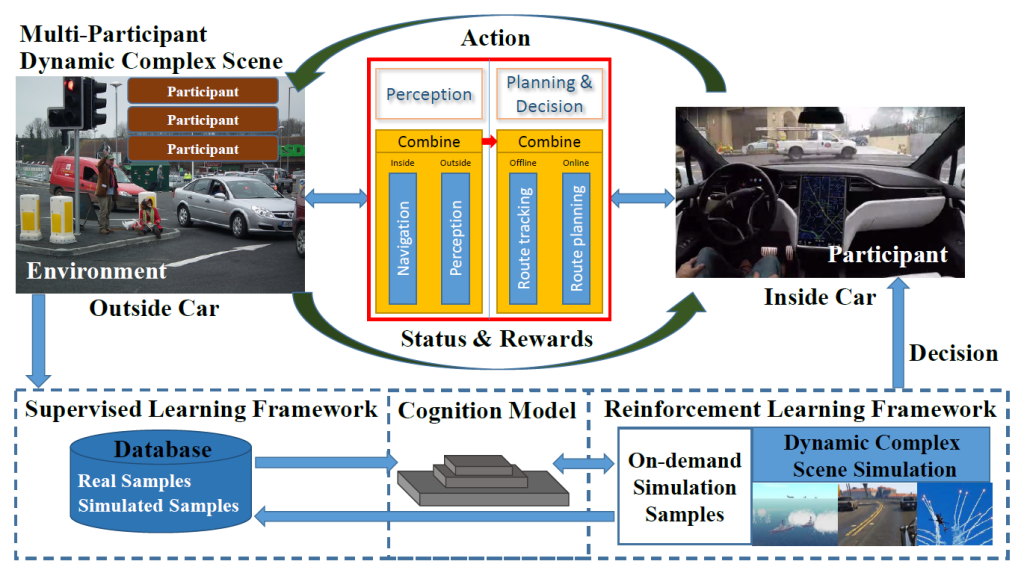
Complex Environment Simulation and Navigation Decision
Multi-object interactional system in real world is too complex to be reconstructed by computer. In our research, an imaging based virtual reality system of object tracking and anti-tracking was established. We have built a photoelectric confrontation simulation system including both seeker and interference to realize 3D object recognition in jamming environment. Our simulation system can provide training samples, testing platform and reinforcement learning environment for visual navigation. The complex environment confrontation simulation system as well as anti-interference recognition and tracking system serves as a core technology in intelligent unmanned system, and has played an important role in applications of multiple areas such as aeronautics, automatic driving, and ships.